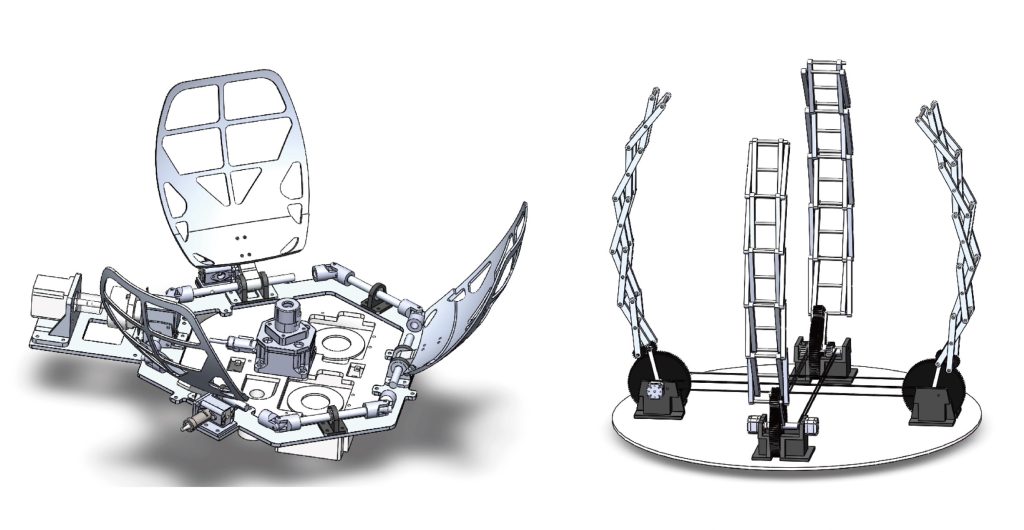
空间碎片捕获机构是一种用于清理地球轨道上太空碎片的装置,减少碰撞风险并维护轨道环境的安全。该载荷配备多个机械臂模块,以环绕包络的形式捕获碎片,能够适应不同尺寸和几何结构的碎片。其中,I型通过包络抓捕方式,可适应不同形状、材质的空间小型目标。II型专为空间大型目标设计,具有高展缩比,控制灵活的特点。
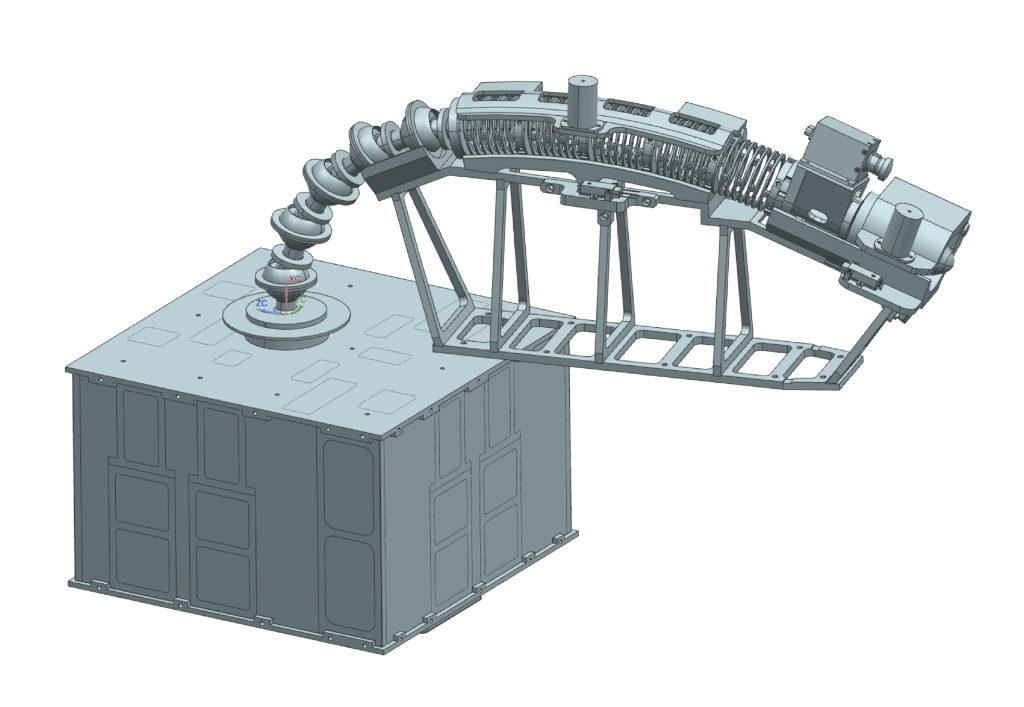
柔性机械臂载荷,是一款低成本、高灵活性的空间操作载荷。末端可更换夹具,适应更多场景。具有高灵活度,高适应性等特点。特别适合在轨维修和在轨加注的应用场景。可在视觉辅助下,由地面操作人员或伺服系统自主完成复杂的在轨操作,具有广泛的应用前景。
空间目标相对导航系统,基于激光测距和双目测距原理,结合机器学习训练得到的目标模型,用于在轨测量空间目标与本体航天器的相对位置和姿态,引导本体航天器的接近、远离、避让等轨道操作。
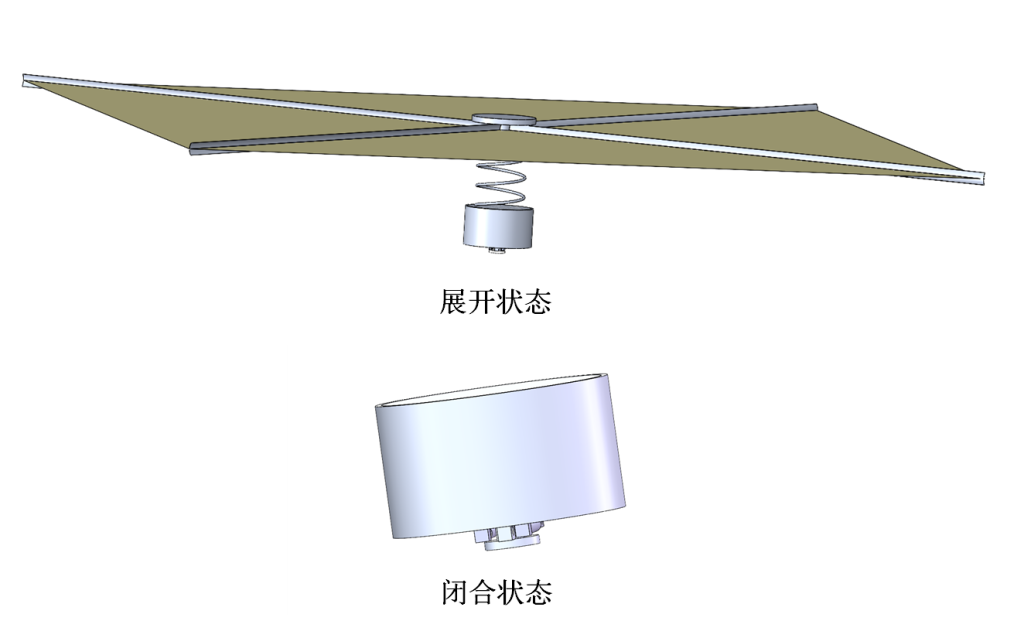
本离轨帆载荷为自主研发的一种空间辅助离轨装置,采用聚酰亚胺薄膜材质,具有轻量化、大展缩比,材质耐腐蚀、低成本、结构简单、无需燃料、高可靠等特点。
基于双目立体视觉技术,依托环境光实现对近距离空间目标的高精度深度感知和三维建模,融合了多种运动传感器,并提供功能丰富的SDK,便于软件开发与集成。本产品对工业级产品进行了多项航天加固改造,并经过多项航天级环境试验,可用于宇航应用。
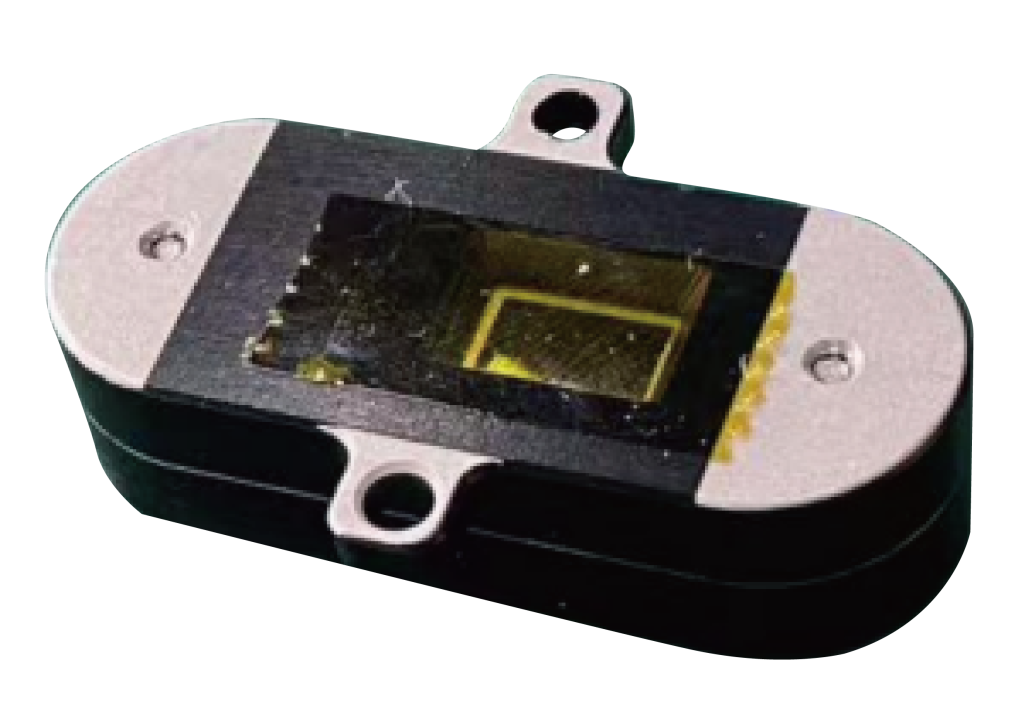
基于TOF技术对近距离空间目标进行三维点云成像,获取目标的点云图、深度图等,具备精度高、尺寸小、功耗低、抗干扰能力强等特点。本产品对工业级产品进行了多项航天加固改造,并经过多项航天级环境试验,可用于宇航应用。
对火箭、卫星等航天器的重要舱外部组件拍摄视频或图片以实现状态监视,也可用于视觉测量,具备尺寸小、视场大、输出图像清晰稳定等特点。本产品在火箭末级、天地往返飞行器、卫星等航天器上均有实际在轨飞行经历。
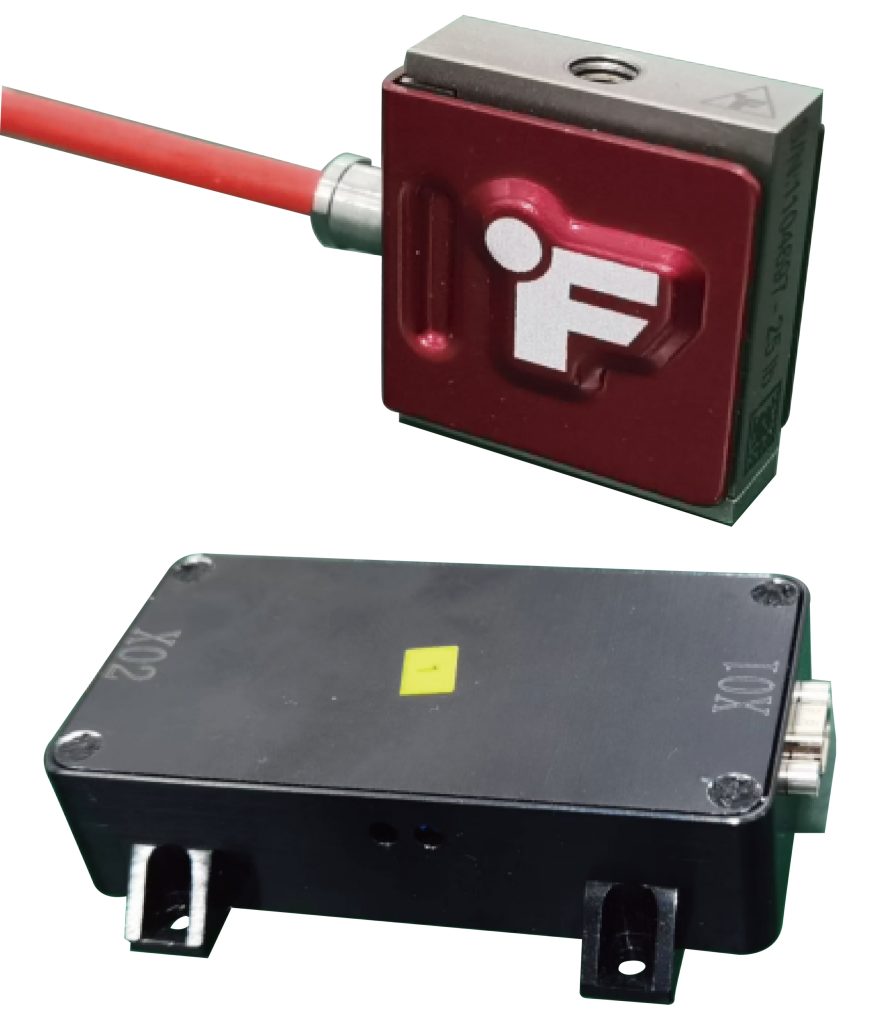
力传感器用于测量单轴拉力/压力,具有线性度高、抗过载能力强等特点。力放大器用于放大力传感器输出的微弱电压信号,具备放大倍数高、噪声低、线性度好等特点。两款产品基于工业级产品进行了多项航天加固改造,并经过多项航天级环境试验,可用于宇航应用。
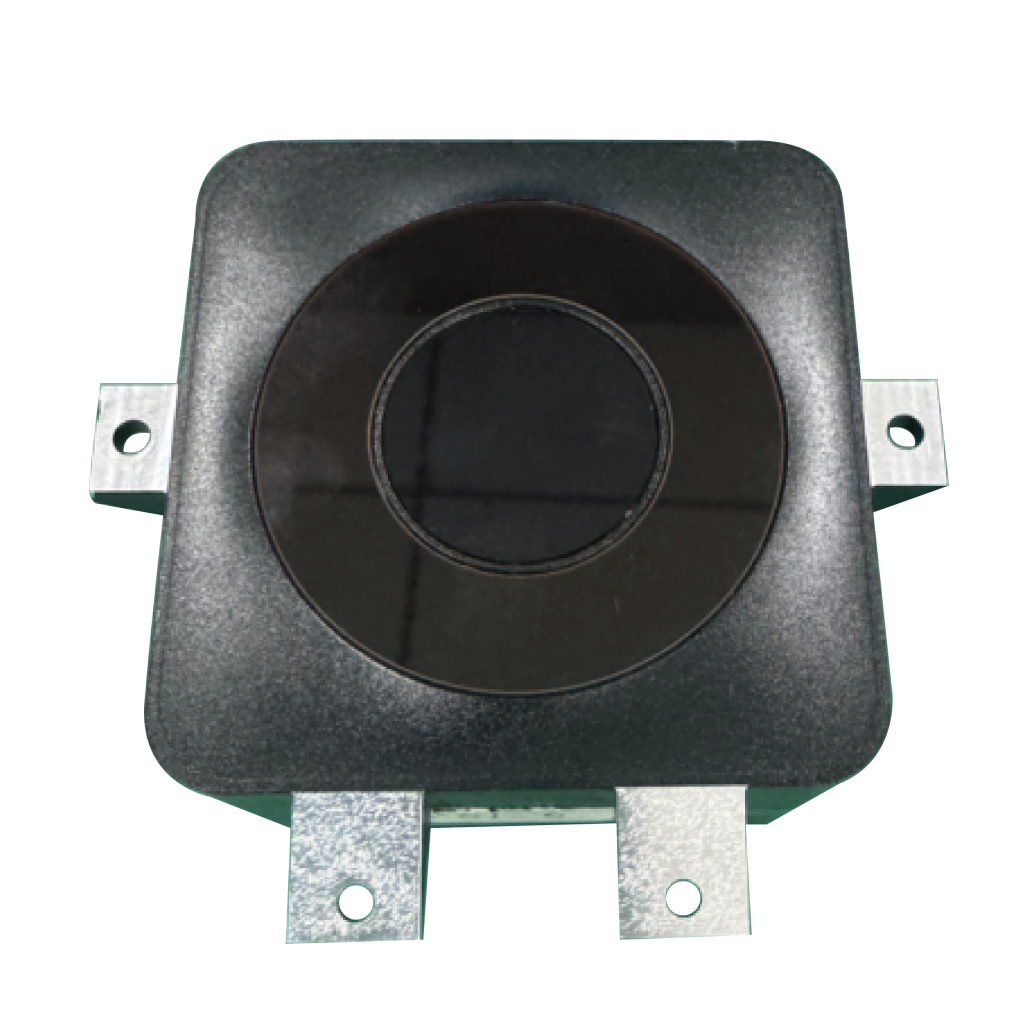
高精度绝对式光电编码器,采用贯穿轴设计,用于测量角位置和方向,可输出单圈角位置信息和多圈角位置信息。本产品对工业级产品进行了多项航天加固改造,并经过多项航天级环境试验,可用于宇航应用。
基于TOF技术的多点阵激光测距传感器,测距范围1.5cm~4m,具备尺寸小、精度高、功耗低等特点。本产品对工业级产品进行了多项航天加固改造,并经过多项航天级环境试验,可用于宇航应用。






 苏公网安备
苏公网安备